信号
当引发信号的事件发生时,为进程产生一个信号(信号产生)(或向进程发送一个信号)。事件可以是硬件异常、软件条件、终端产生的信号或调用kill函数。
在产生了信号时,内核通常在进程表中设置一个某种形式的标志(信号递送)。当对信号采取了这种动作时,我们说向进程递送了一个信号。
在信号产生(generation)和递送(delivery)之间的时间间隔,称信号是未决的(pending)。
进程可以选用信号递送阻塞。如果为进程产生了一个选择为阻塞的信号,而且对该信号的动作是系统默认动作或捕捉该信号,则为该进程将此信号保持为未决状态,直到该进程对此信号解除了阻塞,或者将对此信号的动作更改为忽略。
内核在递送一个原来被阻塞(现在解除了阻塞)的信号给进程时,才决定对它的处理方式。于是进程在信号递送给它之前仍可改变对该信号的动作。
进程调用sigpending函数来判定哪些信号是设置为阻塞并处于未决状态的。
每个进程都有一个信号屏蔽字(signal mask),它规定了当前要阻塞递送到该进程的信号集。对于每种可能的信号,该屏蔽字中都有一位与之对应。对于某种信号,若其对应位已设置,则它当前是被阻塞的。进程可以调用sigprocmask来检测和更改其当前信号屏蔽字。
信号数量可能会超过整型所包含的二进制位数,因此POSIX.1定义了一个新数据类型sigset_t,用于保存一个信号集。
信号与线程的关系
一般我们谈到信号时,都是只与进程挂钩的(多进程设计模式),很少会在线程中使用信号。 如果一个没有处理的信号的默认动作是停止SIGSTOP或终止SIGKILL,那么不管这个信号是发送给哪个线程,整个进程都会停止或终止。
一个进程中的所有线程对某个信号都共享相同的信号处理函数。
使用pthread_kill()或者pthread_sigqueue()。这些函数允许一个线程发送信号到另一个线程(同一进程中)。其他情况都是把信号发送到整个进程(比如,kill()和sigqueue())。当一个信号被发送到一个多线程的进程中(注意是发送到进程)。内核会选择该进程中的任意线程来处理该信号。这种做法是为了保持进程中信号的语意,保证不会在多线程进程中一个信号多次被执行。
常用API
int pthread_sigmask(int how, const sigset_t *set,sigset_t *oldest)
int pthread_kill(pthread_t thread, int sig)
int pthread_sigqueue(pthread_t thread, int sig, constunion sigval value)
int sigwait(const sigset_t *set, int *sig)
线程可以使用pthread_sigmask()来独立的屏蔽某些信号。通过这种方法,程序员可以控制那些线程响应那些信号。当线程被创建时,它将继承创建它的线程的信号掩码
信号处理函数中不要使用线程不安全的函数(如pthread) 在处理信号之前,对所有的异步信号进行阻塞,等工作处理完毕后,再恢复阻塞的信号。
缺点
- 信号的花销太大。发送信号要做系统调用。内核要中断接收进程、要管理它的堆栈、要调用处理程序、要恢复被中断的进程等。
- 信号种类有限,只有31种,而且信号能传递的信息量十分有限。
- 信号没有优先级,也没有次数的概念
共享内存
共享内存就是允许多个不相关的进程访问同一个逻辑内存。是最快的工程间通信方式。
共享内存并未提供同步机制,也就是说,在第一个进程结束对共享内存的写操作之前,并无自动机制可以阻止第二个进程开始对它进行读取。所以我们通常需要用其他的机制来同步对共享内存的访问,例如前面说到的信号量。
代码详情可以看
https://github.com/bingoex/comm/blob/master/src/cm_shm.h
mmap
void *mmap( void *start, size_tlength, int port, int flags, int fd, off_t offset)
flags : 映射文件属性值,可取 MAP_ANON, MAP_PRIVATE, MAP_SHARED,分别代表匿名映射,私有copy-on-write映射,和共享映射。映射的初期并没有 真正分配内存,只有访问页面的时候,引发一个缺页异常,这时才真正分配内存。
管道
- 普通管道PIPE,。通常有两种限制,一是单工,只能单向传输。二是只能在父子或者兄弟进程间使用。
- 流管道。双工,但一样只能在父子或者兄弟进程间使用。
- 命名管道。单工,但可以多进程间使用。
http://www.cnblogs.com/masky5310/archive/2012/08/05/2623764.html
原理
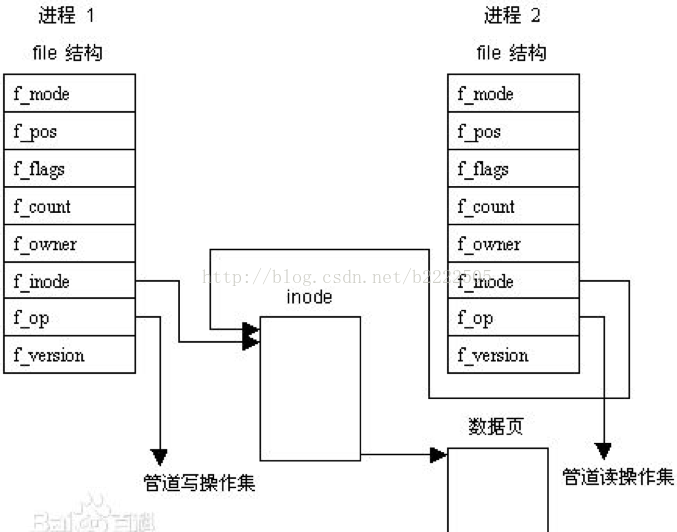
在Linux中,使用两个file数据结构来实现管道。这两个file数据结构中的f_inode指针指向同一个临时创建的VFS I节点,而该VFS I节点本身又指向内存中的一个物理页,如图所示。两个file数据结构中的f_op指针指向不同的文件操作例程向量表:一个用于向管道中写,另一个用于从管道中读。这种实现方法掩盖了底层实现的差异,从进程的角度来看,读写管道的系统调用和读写普通文件的普通系统调用没什么不同。当写进程向管道中写时,字节被拷贝到了共享数据页,当读进程从管道中读时,字节被从共享页中拷贝出来。Linux必须同步对于管道的存取,必须保证管道的写和读步调一致。Linux使用锁、等待队列和信号(locks,wait queues and signals)来实现同步。
如果共享数据页中有足够的空间能把所有的字节都写到管道中,而且管道没有被读进程锁定,则Linux就在管道上为写进程加锁,并把字节从进程的地址空间拷贝到共享数据页。如果管道被读进程锁定或者共享数据页中没有足够的空间,则当前进程被迫睡眠,它被挂在管道I节点的等待队列中等待,而后调用调度程序,让另外一个进程运行。睡眠的写进程是可以中断的(interruptible),所以它可以接收信号。当管道中有了足够的空间可以写数据,或者当锁定解除时,写进程就会被读进程唤醒。当数据写完之后,管道的VFS I 节点上的锁定解除,在管道I节点的等待队列中等待的所有读进程都会被唤醒。
命名管道
命名管道是一种特殊类型的文件(调用mkfifo会产生一个文件),因为Linux中所有事物都是文件,它在文件系统中以文件名的形式存在。程序不能是O_RDWR模式打开FIFO文件进行读写操作,这样做的后果未明确定义,只能一读一写。
#include <stdio.h>
#include <stdlib.h>
#include <string.h>
#include <fcntl.h>
#include <limits.h>
#include <sys/types.h>
#include <sys/stat.h>
#define FIFO_NAME "/tmp/Linux/my_fifo"
#define BUFFER_SIZE PIPE_BUF
#define TEN_MEG (1024 * 1024 * 10)
int main() {
int pipe_fd;
int res;
int open_mode = O_WRONLY;
int bytes = 0;
char buffer[BUFFER_SIZE + 1];
if (access(FIFO_NAME, F_OK) == -1) {
res = mkfifo(FIFO_NAME, 0777);
if (res != 0) {
fprintf(stderr, "Could not create fifo %s/n", FIFO_NAME);
exit(EXIT_FAILURE);
}
}
printf("Process %d opening FIFO O_WRONLY/n", getpid());
pipe_fd = open(FIFO_NAME, open_mode);
printf("Process %d result %d/n", getpid(), pipe_fd);
if (pipe_fd != -1) {
while (bytes < TEN_MEG) {
res = write(pipe_fd, buffer, BUFFER_SIZE);
if (res == -1)
{
fprintf(stderr, "Write error on pipe/n");
exit(EXIT_FAILURE);
}
bytes += res;
}
close(pipe_fd);
}
else
{
exit(EXIT_FAILURE);
}
printf("Process %d finish/n", getpid());
exit(EXIT_SUCCESS);
}
#include <stdio.h>
#include <stdlib.h>
#include <string.h>
#include <fcntl.h>
#include <limits.h>
#include <sys/types.h>
#include <sys/stat.h>
#define FIFO_NAME "/tmp/Linux/my_fifo"
#define BUFFER_SIZE PIPE_BUF
int main() {
int pipe_fd;
int res;
int open_mode = O_RDONLY;
char buffer[BUFFER_SIZE + 1];
int bytes = 0;
memset(buffer, '/0', sizeof(buffer));
printf("Process %d opeining FIFO O_RDONLY/n", getpid());
pipe_fd = open(FIFO_NAME, open_mode);
printf("Process %d result %d/n", getpid(), pipe_fd);
if (pipe_fd != -1){
do{
res = read(pipe_fd, buffer, BUFFER_SIZE);
bytes += res;
}while(res > 0);
close(pipe_fd);
}
else{
exit(EXIT_FAILURE);
}
printf("Process %d finished, %d bytes read/n", getpid(), bytes);
exit(EXIT_SUCCESS);
}
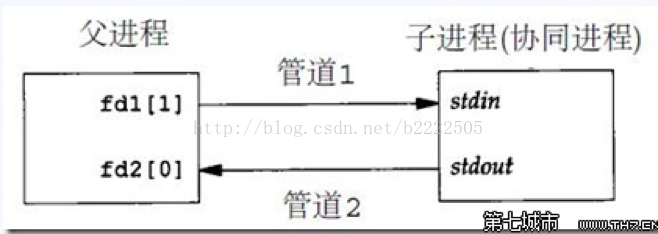
协同进程
当一个程序产生某个过滤程序的输入,同时又读取该过滤程序的输出时,则该过滤程序就成为协同进程(coprocess)。
//filter.c
#include <errno.h>
#include <fcntl.h>
#include <sys/wait.h>
#include <sys/stat.h>
#include <unistd.h>
#include <stdio.h>
#define MAXLINE 128
int main(void){
int n, int1, int2;
char line[MAXLINE];
while ((n = read(STDIN_FILENO, line, MAXLINE)) > 0) {
line[n] = 0; /* null terminate */
if (sscanf(line, "%d%d", &int1, &int2) == 2) {
sprintf(line, "%d/n", int1 + int2);
n = strlen(line);
if (write(STDOUT_FILENO, line, n) != n)
printf("write error/n");
} else {
if (write(STDOUT_FILENO, "invalid args/n", 13) != 13)
printf("write error/n");
}
}
exit(0);
}
运行:
[root@localhost yuan]# gcc -o filterd filterd.c
[root@localhost yuan]# ./filterd
12 34
46
示例2:驱动上述过滤程序filter.c的程序
//filterd.c
#include <errno.h>
#include <fcntl.h>
#include <sys/wait.h>
#include <sys/stat.h>
#include <unistd.h>
#include <stdio.h>
#include <signal.h>
#define MAXLINE 128
static void sig_pipe(int); /* our signal handler */
int main(void){
int n, fd1[2], fd2[2];
pid_t pid;
char line[MAXLINE];
if (signal(SIGPIPE, sig_pipe) == SIG_ERR)
printf("signal error/n");
if (pipe(fd1) < 0 || pipe(fd2) < 0)
printf("pipe error/n");
if ((pid = fork()) < 0) {
printf("fork error/n");
} else if (pid > 0) {
printf("parent process/n"); /* parent */
close(fd1[0]);
close(fd2[1]);
while (fgets(line, MAXLINE, stdin) != NULL) {
n = strlen(line);
if (write(fd1[1], line, n) != n)
printf("write error to pipe/n");
if ((n = read(fd2[0], line, MAXLINE)) < 0)
printf("read error from pipe/n");
if (n == 0) {
printf("child closed pipe");
break;
}
line[n] = 0; /* null terminate */
if (fputs(line, stdout) == EOF)
printf("fputs error/n");
}
if (ferror(stdin))
printf("fgets error on stdin/n");
exit(0);
} else {
printf("child process/n"); /* child */
close(fd1[1]);
close(fd2[0]);
if (fd1[0] != STDIN_FILENO) {
if (dup2(fd1[0], STDIN_FILENO) != STDIN_FILENO)
printf("dup2 error to stdin/n");
close(fd1[0]);
}
if (fd2[1] != STDOUT_FILENO) {
if (dup2(fd2[1], STDOUT_FILENO) != STDOUT_FILENO)
printf("dup2 error to stdout/n");
close(fd2[1]);
}
if (execl("./filter", "filter", (char *)0) < 0)
printf("execl error/n");
}
exit(0);
}
static void sig_pipe(int signo)
{
printf("SIGPIPE caught/n");
exit(1);
}
运行:filter存在
[root@localhost yuan]# gcc -o filterd filterd.c
[root@localhost yuan]# ./filterd
child process
parent process
12 34
46
缺点
- 因为读数据的同时也将数据从管道移去,因此,管道不能用来对多个接收者广播数据。
- 管道中的数据被当作字节流,因此无法识别信息的边界。
- 如果一个管道有多个读进程,那么写进程不能发送数据到指定的读进程。同样,如果有多个写进程,那么没有办法判断是它们中那一个发送的数据
消息队列
消息的一个链表,它允许一个或多个进程向它写消息,一个或多个进程从中读消息。
原理
向消息队列中写的进程(wwait)和等待从消息队列中读的进程(rwait)。如果某进程向一个消息队列发送消息而发现该队列已满,则进程挂在wwait队列中等待。从该消息队列中读取消息的进程将从队列中删除消息,从而腾出空间,再唤醒wwait队列中等待的进程。如果某进程从一个消息队列中读消息而发现该队列已空,则进程挂在rwait队列中等待。向该消息队列中发送消息的进程将消息加入队列,再唤醒rwait队列中等待的进程。
int sys_msgget (key_t key, int msgflg)
int sys_msgsnd (int msqid, struct msgbuf*msgp, size_t msgsz, int msgflg)
ssize_t msgrcv(int msqid, void *msgp,size_t msgsz, long msgtyp, int msgflg);
int msgctl ( int msgqid, int cmd, structmsqid_ds *buf );
#define MSGKEY 1024
struct msgstru
{
long msgtype;
char msgtext[2048];
};
//生产消息
msqid=msgget(MSGKEY,IPC_EXCL); /*检查消息队列是否存在*/
if(msqid < 0){
msqid = msgget(MSGKEY,IPC_CREAT|0666);/*创建消息队列*/
if(msqid <0){
printf("failed to create msq | errno=%d [%s]\n",errno,strerror(errno));
exit(-1);
}
}
while (1){
printf("input message type(end:0):");
scanf("%d",&msg_type);
if (msg_type == 0)
break;
printf("input message to be sent:");
scanf ("%s",str);
msgs.msgtype = msg_type;
strcpy(msgs.msgtext, str);
/* 发送消息队列 */
ret_value = msgsnd(msqid,&msgs,sizeof(struct msgstru),IPC_NOWAIT);
if ( ret_value < 0 ) {
printf("msgsnd() write msg failed,errno=%d[%s]\n",errno,strerror(errno));
exit(-1);
}
}
msgctl(msqid,IPC_RMID,0); //删除消息队列
//获取消息
/*子进程,监听消息队列*/
void childproc(){
struct msgstru msgs;
int msgid,ret_value;
char str[512];
while(1){
msgid = msgget(MSGKEY,IPC_EXCL );/*检查消息队列是否存在 */
if(msgid < 0){
printf("msq not existed! errno=%d [%s]\n",errno,strerror(errno));
sleep(2);
continue;
}
/*接收消息队列*/
ret_value = msgrcv(msgid,&msgs,sizeof(struct msgstru),0,0);
printf("text=[%s] pid=[%d]\n",msgs.msgtext,getpid());
}
return;
}
void main()
{
int i,cpid;
/* create 5 child process */
for (i=0;i<5;i++){
cpid = fork();
if (cpid < 0)
printf("fork failed\n");
else if (cpid ==0) /*child process*/
childproc();
}
}
优点
消息队列和管道提供相似的服务,但消息队列要更加强大并解决了管道中所存在的一些问题。消息队列传递的消息是不连续的、有格式的信息,给对它们的处理带来了很大的灵活性。
缺点
小消息的传送效率很高,但大消息的传送性能则较差。因为消息传送的过程中要经过从用户空间到内核空间,再从内核空间到用户空间的拷贝,所以,大消息的传送其性能较差。另外,消息队列不支持广播,而且内核不知道消息的接收者
如果文章对您有帮助,欢迎扫描下方二维码赞助(一分也是爱噢),谢谢

